

Ⅰ. 서론
최근 들어 드론 기술이 민간의 다양한 분야에서 활용되면서 드론 관련 산업계는 물론 일반 대중으로부터도 많은 관심을 끌고 있다. 이에 따라서 다양한 응용들을 지원하기 위해 고유한 특성과 디자인을 가진 다양한 드론들이 출시되고 있다. 종이접기 모양의 드론[1], 벌레가 벽을 타는 것처럼 자연스럽게 벽을 타는 드론[2], 공중정지와 순항을 자유롭게 전환하는 드론[3], 군수품 수송을 위한 버리는 드론[4] 등은 다양한 드론의 예를 보여준다. 또한 드론 기체와 관련된 연구는 아니지만, 최근의 연구개발 추세 중 하나인 드론의 안전운항을 위한 기계학습 적용 기술[5]과 실감 나는 드론 시뮬레이터 기술 개발[6]도 흥미 있는 연구 개발 주제이다.
드론 관련 기술들이 크게 발전함에 따라 드론 지원 통신 영역 확장, 드론 지원 중계 통신, 드론 지원 데이터 수집 및 분배와 같은 드론 지원 무선 통신이 부상하고 있다[7]. 그중에서 드론 지원 데이터 수집 및 분배는 드론 기반의 무선 센서 네트워크의 형태로 구현된다. 일반적인 무선 센서 네트워크에서 센서들로부터의 데이터는 한 노드에서 다른 노드로 전송되고, 다시 또 다른 노드로 전송되어 궁극적으로는 싱크에 전송될 때까지 반복된다. 이러한 전송과정에서 센서 노드들은 자신의 데이터 전송뿐만 아니라 다른 노드들의 데이터 전송을 중계하기 위해 에너지를 소모한다. 그래서 이러한 데이터 전송과정은 네트워크의 크기가 커질수록 배터리 기반의 센서 노드들에는 큰 부담이 된다.
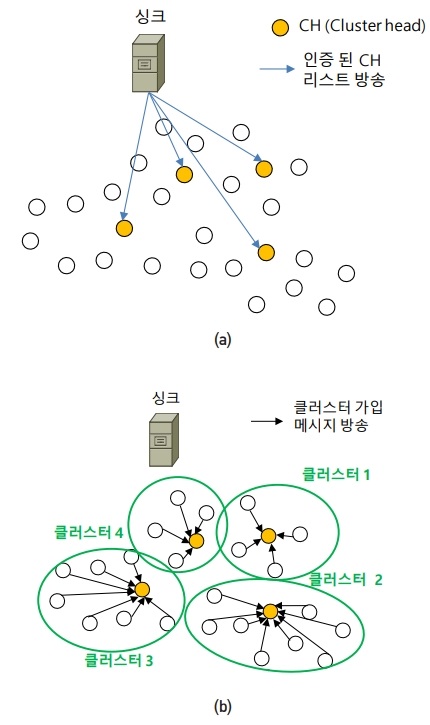
그림 1의 (a)는 일반적인 무선 센서 네트워크에서 데이터 전송 과정을 보여준다. 만일 싱크가 긴급한 정보를 센서 노드들에게 분배해야 한다면, 반대 방향의 데이터 전송 폭풍이 또한 발생하게 된다. 이러한 측면에서 무선 센서 네트워크를 클러스터 구조로 변환하고 드론을 이용하여 데이터 전송 및 분배를 수행하면, 데이터 전송 및 분배 과정을 신속하게 함은 물론, 센서 노드들의 에너지를 크게 절약할 수 있다. 그림 1의 (b)는 드론 기반 무선 센서 네트워크에서의 데이터 전송 과정을 보여준다. 또한, 이 과정에서 드론을 이용하여 데이터 집약노드들을 선정하면, 전송 데이터의 보안성도 높일 수 있다[8].

본 고의 구성은 다음과 같다. Ⅱ장에서는 드론 기반 무선 센서 네트워크의 통신 기술 동향을 살펴본다. Ⅲ장에서는 드론 기반 무선 센서 네트워크의 보안 기술 동향을 살펴본다. Ⅳ장에서는 드론 기반 무선 센서 네트워크의 발전 방안들을 제시하고, Ⅴ장에서는 결론을 내린다.
Ⅱ. 드론 기반 무선 센서 네트워크의 통신 기술 동향
1. 드론 기반 무선 센서 네트워크에서의 데이터 수집 최적화
드론 기반의 무선 센서 네트워크에서 클러스터 구조는 데이터 수집 과정의 효율성 및 관리성을 높이기 위해 자주 사용된다. Ho 등은 이러한 클러스터 구조하에서 드론이 각 클러스터의 어떤 노드와 접촉하는 것이 노드들의 에너지를 절약하고 네트워크의 수명을 늘릴 수 있는지 조사하였다[9]. 제안 방법에서는 드론이 각 클러스터에서 노드들의 에너지 소모를 최소화하는 노드와 접촉하도록 하고, 접촉노드와 원거리에 있는 노드들은 중계 노드를 이용하여 데이터를 전송하도록 하였다. 실험 결과는 이러한 방법이 노드들의 평균 에너지 소모와 네트워크의 수명을 연장시킴을 증명하였다.
Ho 등은 센서 노드들의 전송 시 비트 에러율(BER: Bit Error Rate) 감소, 에너지 소모 감소, 그리고 드론의 비행시간 최소화를 목표로 하는 Particle Swarm Optimization(PSO) 기법을 제안하였다[10]. 제안된 PSO 방법은 Low-Energy Adaptive Clustering Hierarchy(LEACH)에 비해 드론의 비행시간은 비슷하게 유지하면서 노드들의 에너지 소모 및 BER을 크게 감소시켰다. 노드들의 에너지 소모가 평균적으로 감소함으로써 네트워크의 수명이 증가하였고, 바람은 드론의 비행시간에만 영향을 미칠 뿐 에너지 소모와 BER에는 별 영향이 없었다.
Dong 등은 드론 기반의 무선 센서 네트워크에서 드론이 각 클러스터에 이동 에이전트 프로그램을 보내고, 그 에이전트가 각 클러스터에서 노드들로부터 데이터를 수집하는 알고리즘을 제안하였다[11]. 이동 에이전트는 데이터를 모두 수집한 뒤에 드론으로 다시 되돌아가고, 드론은 이동 에이전트로부터 넘겨받은 데이터를 이용하여 적절한 행위를 취한다. 그러나 이 방법은 다른 방법과의 비교검증이 이루어지지 않아서 다른 데이터 전송 기법들에 대비한 성능이나 보안 측면의 우수성은 확실하지 않다.
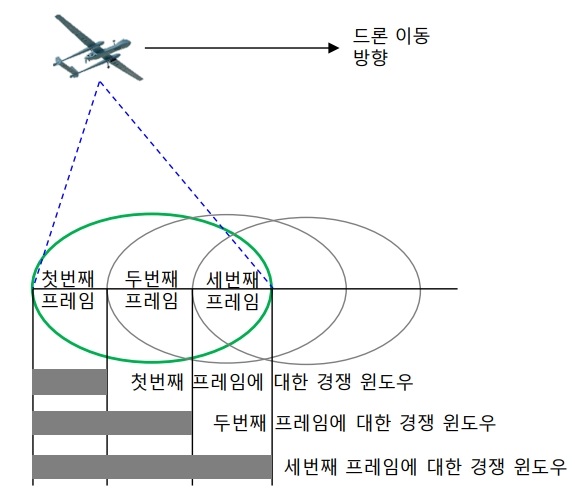
Say 등은 그림 2처럼 드론 기반 무선 센서 네트워크에서 드론의 임무 영역을 여러 프레임으로 나누고 각 프레임에 다른 우선순위를 부여함으로써 데이터 전송의 효율성을 높이는 방법을 제안하였다[12]. 즉 각 프레임에서 충돌과 패킷 손실을 줄이기 위하여, 우선순위가 높은 프레임에는 IEEE 802.11의 경쟁 윈도우를 작게 만들어서 전송의 기회가 자주 보장되도록 하였다. 이들은 또한 Medium Access Control(MAC) 계층의 데이터 전송 기법에 적합한 새로운 라우팅 프로토콜을 설계하였고, 이 프로토콜의 성능을 기존의 LEACH 프로토콜과 비교하였다. 실험 결과는 제안한 MAC 계층 프로토콜이 패킷의 손실과 충돌을 크게 줄이고, 제안한 라우팅 프로토콜이 노드들의 에너지 소모를 크게 줄임을 증명하였다.
2. 드론 기반 무선 센서 네트워크에서의 드론 위치 및 이동 경로 최적화
Zhan 등은 감쇄가 발생하는 무선 채널에서 드론과 센서 노드가 통신할 때, 센서 노드들의 기상 스케줄 조정과 드론의 이동 경로 조정에 따라 노드들의 에너지를 절약하는 방법을 제안하였다[13]. 수치 분석 결과는 제안된 기법이 다른 기법들에 비해 많은 양의 에너지를 절약함을 입증하였다.
Mozaffari 등은 계층화되지 않은 Internet of Things(IoT) 네트워크에서 에너지 효율적인 데이터 수집 방법을 제안하였다[14]. 먼저, IoT 장치들의 위치가 각 시간에 결정되고 나면, 드론들의 최적 위치와 드론들과 센서들 간의 연계가 설정된다. 다음으로, 시간에 따라 변하는 네트워크에서 IoT 장치들을 지원하기 위한 드론들의 최적 이동 패턴들이 분석된다. 실험 결과는 제안한 방법이 IoT 장치들의 전체 전송 전력을 크게 줄이고, 시스템의 신뢰성을 높임을 보여주었다. 여기서 신뢰성은 모든 IoT 장치들이 드론들과 통신하는 확률을 의미하였다.
3. 드론 기반 무선 센서 네트워크에서의 드론 비행 경로 최적화
Xu 등은 긴급한 데이터가 존재하는 영역에서 지연과 손실 없이 먼저 정보를 얻기 위해 Markov Decision Process(MDP)를 이용하는 방법을 제안하였다[15]. 제안방법은 동물원에서 얼룩말의 이동 패턴 데이터 집합을 이용한 시뮬레이션에서 탐욕적 방법, 무작위 휴리스틱 기법, 여행하는 판매원 기법에 비해 우수한 성능을 보여줌을 입증하였다.
Tseng 등은 임무 영역에 재충전 스테이션들을 설치하고, 드론의 비행 경로를 설계할 때 재충전 스테이션들에 들러서 재충전하는 것까지 고려한 비행 경로 계획 방법을 제안하였다[16]. 이러한 재충전 스테이션의 이용은 드론의 운용 시간을 크게 증가시켰으며, 함께 개발된 재충전 관리 시스템은 드론의 자동 재충전을 지원하였다. 또한 재충전 스테이션의 이용은 기상악화로 인한 드론의 비상시 운용에도 도움이 된다는 것을 입증하였다.
표 1은 앞에서 살펴본 드론 기반 무선 센서 네트워크에서의 통신 기술들을 요약한 것이다. 표 1에서 보는 것처럼, 데이터 수집 최적화 기법들의 성능 목표는 데이터를 제공하는 센서 노드들의 에너지 소모를 최소화하여 네트워크 수명을 늘리는 것이다. 이는 드론 기반의 무선 센서 네트워크 자체가 드론을 이용하여 센서 노드들의 원거리 데이터 전송을 회피하기 위하여 탄생한 것이기에 당연한 결과이다. 드론은 센서 노드들에 비해서는 더 많은 양의 에너지를 보유하고 있으므로, 드론의 위치 및 이동 경로 최적화 기법들의 목표 또한 센서 노드들의 에너지 소모 감소가 첫 번째이다.
표 1 드론 기반 무선 센서 네트워크 통신 기술
| 구분 | 방법 | 성능 목표 | 성능 검증 방법 | 비고 |
|---|---|---|---|---|
| 데이터 수집 최적화 | 노드 에너지 소모 최적화[9] | 노드들의 평균 에너지 소모량 감소 | 시뮬레이션 | |
| PSO 기법[10] | 노드들의 에너지 소모 및 BER 감소, 드론 비행시간 감소 | Monte-Carlo 시뮬레이션 | ||
| 이동 에이전트 기법[11] | 노드 수명 증가, 에너지 소모 감소 | NetLogo 시뮬레이션 | ||
| 경쟁 윈도우 조정 기법[12] | 처리율 및 전송률 증가, 에너지 소모 감소 | Matlab 시뮬레이션 | ||
| 드론 위치 및 이동 경로 최적화 | 센서의 기상(wakeup) 스케줄 및 드론 이동 경로 조정[13] | 노드들의 에너지 소모 감소 | 수치 분석 | |
| 드론들의 위치 및 이동 경로 조정[14] | 노드들의 에너지 소모 감소, 신뢰성 | 시뮬레이션 | ||
| 드론 비행 경로 최적화 | MDP 기반 방법[15] | 데이터 획득 지연 감소 | 자체 제작 시뮬레이션 | 얼룩말 이동 패턴 추적 데이터 사용 |
| 재충전 스테이션 설치 방법[16] | 드론 운용 시간 증가, 최적 비행 경로 | 실제 드론을 이용한 실험 | 바람에 따른 성능 영향 분석 |
그러나 일부 센서들이 드론의 서비스를 받지 못하면, 스스로 싱크와 통신하기 위해서 많은 양의 에너지를 소모해야 한다. 따라서 드론들이 모든 센서 노드에게 서비스할 수 있도록 해 주는 신뢰성 또한 중요한 목표 중 하나가 되어야 한다. 반면에, 드론의 비행 경로 최적화 기법들은 그 응용에 따라서 다른 성능 목표를 가진다. 예를 들어, 데이터 수집의 신속성이 담보되어야 하는 응용에서는 데이터를 획득하는 데 소요되는 시간의 최소화가 목표가 되어야 한다[15]. 만일, 드론의 운영 시간을 최대로 늘려서 운영하는 것이 요구되는 응용이라면, 재충전 스테이션을 설치하고 이에 따른 최적의 비행 경로를 계산하는 것이 목표가 되어야 한다[16].
Ⅲ. 드론 기반 무선 센서 네트워크의 보안 기술 동향
1. 드론 기반 무선 센서 네트워크를 위한 인증 및 키 관리 기술
지금까지 일반적인 무선 센서 네트워크를 위한 많은 인증 및 키 관리 기술들이 제안되어 왔다. 센서 노드 간의 인증이나 키 설정을 위해서는 미리 센서 노드들에게 분배된 키들을 이용한다. 즉, 임의의 두 노드 간에 공유된 키들을 이용하여 메시지를 교환함으로써 두 노드는 서로를 인증할 수 있다. 또한, 두 노드 간에 공유된 키들을 이용하여 새로운 키를 생성하고, 이 키를 통신용 pairwise키로 사용할 수 있다. 드론 기반 무선 센서 네트워크는 싱크가 수행하는 역할을 무인기가 대신 수행하는 것을 제외하면, 통신 구조가 일반 무선 센서 네트워크와 동일하다. 따라서, 일반 무선 센서 네트워크에서 사용 가능한 많은 인증 및 키 관리 기법을 드론 기반 무선 센서 네트워크에 적용할 수 있다[8]. 즉 센서 노드 간의 통신에 사용되는 pairwise키는 그대로 사용하면 되고, 센서 노드와 싱크 간의 통신에 사용되는 키는 드론과 센서 노드 간의 그룹키로 사용될 수 있다.
2. 드론 기반 무선 센서 네트워크를 위한 클러스터 구성 보안
임의의 물리적인 센서 네트워크를 이웃 노드 간의 논리적 묶음인 클러스터들의 집합으로 변환시키는 것을 클러스터 구성이라 한다. 클러스터 구성은 이웃 노드들을 먼저 묶어서 묶음 자체를 만드는 클러스터 우선 방법과 중심이 되는 노드인 클러스터 헤드(CH: Cluster Head)를 먼저 선출하고, 이 CH의 멤버십을 결정하는 CH 우선 방법으로 나뉜다.
Wang 등은 클러스터 내에서 노드 간의 거리가 최대 2홉이 되게 하며, 부응성 체크와 공개키 기반의 서명 및 검증을 통해 안전한 클러스터를 구성하는 방법[17]을 제안하였다. 제안 방법은 실험 결과를 통해 1홉 기반의 클러스터 우선 구성 방법에 비해 더 작은 에너지를 소모하면서도 더 많은 수의 오염 노드들을 클러스터 생성에서 배제함을 증명하였다.
CH 우선 방법인 F-LEACH[18]에서, 임의의 노드는 자신이 싱크와 공유하는 키들을 이용하여 자신을 CH로 선언하고, 싱크는 역시 공유된 키들을 이용해서 CH 선언들을 검증한다. 이후에 싱크는 검증된 CH들을 소스 인증 기법을 이용하여 방송하고, 일반 노드들은 그들 중에서 하나의 CH에 가입한다. 그림 3은 F-LEACH에서의 CH 선언 노드 인증 및 가입 방법을 보여준다. 이 방법의 단점은 멤버 노드들의 클러스터 가입을 검증하지 않는다는 것이다. 이 문제를 해결하기 위해 Oliveira 등은 싱크가 CH 선언 노드들을 인증하고, CH들이 멤버 노드들의 가입을 인증하는 SecLEACH[19]를 제안하였다. 두 CH 우선 방법들은 모두 센서들이 배치되기 전에 인증을 위한 키들을 미리 분배 받는다는 가정을 전제로 한다. 따라서 두 방법은 분배된 키들을 가지지 않은 공격자들로부터만 클러스터 구성을 보호할 수 있다. 즉, 그들은 임무 현장에 배치된 후에 오염된 노드들이 클러스터 구성에 참여하고 CH로 선언하는 것을 전혀 막을 수 없다.
3. 드론 기반 무선 센서 네트워크를 위한 CH 선출 보안
드론 기반 무선 센서 네트워크에서 임의의 클러스터는 CH와 멤버로 구성되며, 멤버는 자신의 센서로 읽은 데이터를 CH로 전송하고 CH는 멤버들로부터 수집한 데이터를 드론에게 전송하는 역할을 수행한다. 따라서 임의의 오염된 노드가 CH로 선출되면, 그 클러스터에서 수집된 모든 데이터가 공격자에게 노출되며, 변조된 데이터가 드론에게 전송될 수 있다. 또한 만일 모든 CH의 위치에 오염된 노드들이 자리를 차지하게 되면, 전체 네트워크가 공격자에게 놓이게 되는 위험을 맞이하게 된다. 따라서, 오염된 노드들이 CH로 선출되지 않도록 보호하는 것이 드론 기반의 무선 센서 네트워크에서 필수적이다.
Wang 등은 드론을 이용한 CH 선출 프레임워크를 생성하고, 이 프레임워크를 기존의 CH 선출 보안 기법들에 적용하기 위한 방법을 제시하였다[20]. 이를 위해서 먼저 기존의 CH 선출 보안 기법들을 키 선분배 기법, 난수 기법, 키 체인 기법, 암호학적 기법으로 분류하고, 각각의 기법을 제안된 프레임워크에 적용하기 위한 방법들을 제시하였다. 다음으로, 기존의 CH 선출 보안 기법들의 보안성 비교와 성능 비교를 수행하였다. 마지막으로, 드론의 비행 시간을 증가시키기 위한 방안들을 제시하였다.
드론 기반의 무선 센서 네트워크에서 고정된 클러스터 구조를 생성하고, 이 고정된 클러스터 구조 내에서 드론을 이용하여 CH 역할을 각 멤버에게 교대로 분배하는 드론 기반 CH 선출 프레임워크[8]가 제안되었다. 그림 4는 고정 클러스터 구조에서 드론을 이용한 CH 선출 프레임워크를 보여준다. 이 프레임워크는 일반적인 CH 선출 프레임워크와 비교되었으며, 실험 결과는 제안된 프레임워크가 오염된 메시지 수와 오염된 노드가 CH로 선출된 횟수를 크게 감소시킴을 보여주었다. 또 다른 실험 결과는 제안된 프레임워크가 노드들의 에너지 소모를 크게 줄여서 네트워크의 수명을 크게 증가시킴을 증명하였다.
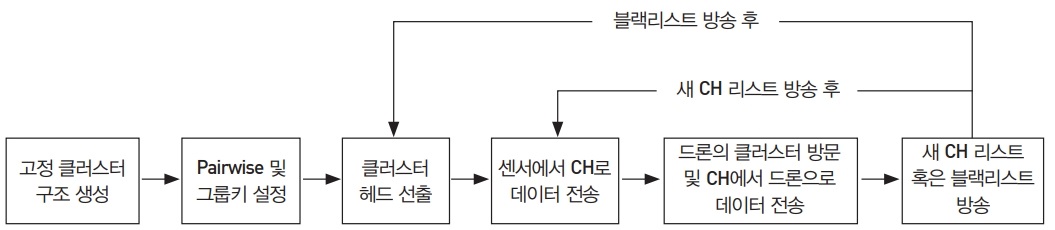
표 2는 앞에서 살펴본 드론 기반 무선 센서 네트워크에서의 보안 기술들을 요약한 것이다. Ⅲ.1절에서 설명했던 것처럼, 인증 및 키 관리 기술들은 기본적으로 미리 분배된 키 중에서 공동으로 소유하고 있는 키들을 이용하여 노드들 사이의 인증과 키 설정을 수행한다. 따라서 오염된 노드들이 보유한 선분배 키들을 협력적으로 이용한다고 하더라도, 인증이나 키 설정이 와해되지 않도록 해야 한다. 클러스터 구성 기법들의 우선적인 보안 목표는 적법한 노드들이 클러스터 구성 과정에 참여하도록 하는 것이다. F-LEACH는 클러스터 구성 과정을 시작하는 노드의 적법성 검증을 목표로 하는 반면에, SecLEACH는 클러스터 구성 과정의 시작 노드와 이에 가입하는 멤버들까지 검증하는 것을 목표로 한다. 그러나 두 방법은 오염된 노드들이 클러스터 구성에 참여하는 것을 배제하지 못한다. 반면에 2홉 부응성 체크 클러스터 구성은 오염된 노드가 클러스터 구성에 참여하지 못하도록 막는 것을 목표로 한다. F-LEACH 및 SecLEACH와 같은 CH 우선 방법들의 문제점은 무자격 노드가 CH로 선언하여도 이를 막을 수 있는 방법이 없다는 것이다. 드론 이용 CH 선출 프레임워크는 이러한 문제를 해결하고, 모든 CH 선출 보안 기법들을 채용할 수 있는 틀을 제공한다. 반면에, 고정 클러스터 구조 기반의 드론 이용 CH 선출 프레임워크는 초기 클러스터 구성 후에 노드 간의 키 설정을 수행하기 때문에 데이터 전송 시의 기밀성 및 무결성을 보호할 수 있다. 또한, 드론을 이용하여 수집된 데이터를 기반으로 싱크가 CH들을 선출하기 때문에 오염된 노드들의 CH 선출 횟수를 크게 감소시킬 수 있다.
표 2 드론 기반 무선 센서 네트워크 보안 기술
| 구분 | 방법 | 보안 목표 | 보안성 검증 방법 |
|---|---|---|---|
| 인증 및 키 관리 | 노드들 간에 공유된 선분배 키들을 이용한 인증, 공유된 선분배 키들을 이용한 pairiwse키 및 그룹키 설정 | 오염된 노드들의 협력에 대한 강건성 유지 | 시뮬레이션, 확률 수치 분석 |
| 클러스터 구성 보안 | 2홉 부응성 체크 기반의 클러스터 구성[17] | 오염된 노드를 제외한 클러스터 구성 | 시뮬레이션, 수학적 증명 |
| F-LEACH[18] | 적법한 노드의 클러스터 구성 시작 검증 | 보안성 분석 | |
| Sec-LEACH[19] | 적법한 노드의 클러스터 구성 시작 및 적법한 멤버의 가입 검증 | 보안성 분석, 시뮬레이션 | |
| CH 선출 보안 | 드론 이용 CH 선출 프레임워크[20] | 무자격 노드의 불법적인 CH 선언 방지 | 보안성 분석 |
| 고정 클러스터 구조에서 드론을 이용한 CH 선출 프레임워크[8] | 전송 데이터의 기밀성 및 무결성 보호, 오염노드의 CH 선출 횟수 감소 | 시뮬레이션 |
Ⅳ. 드론 기반 무선 센서 네트워크의 발전 방안
1. 드론 기반 무선 센서 네트워크의 통신 발전 방안
일반적인 무선 센서 네트워크와 마찬가지로 드론 기반 무선 센서 네트워크의 노드들도 센싱, 계산, 데이터 집약, 통신, 암?복호화 등의 에너지를 소모하는 활동들을 수행한다. 따라서 시간이 지날수록 에너지를 모두 소모하여 소멸되는 노드들이 발생하므로, 드론의 에너지 측면에서는 고정된 클러스터 구조보다는 시간에 따라 변경되는 유연한 클러스터 구조가 유리하다. 즉, 수집할 데이터의 양이 매우 작은 클러스터들을 드론이 지속적으로 방문하기보다는 다른 클러스터에 편입시켜서 데이터를 수집하는 것이 드론의 에너지 측면에서는 유리하다.
센서 노드들이 배치된 환경에 따라서 신호의 감쇄가 발생하거나 장애물 등에 의한 연결 단절 등이 발생할 수 있다. 만일 단일 드론만으로 무선 센서 네트워크가 배치된 영역을 모두 서비스하고, 드론과 임의의 CH 간에 통신이 실패하는 경우에는 데이터 획득에 실패하게 된다. 이를 방지하기 위해서는 드론이 모든 클러스터를 방문한 후에 데이터 획득에 실패한 클러스터를 다시 방문하도록 비행 경로를 수정하는 방법이 요구된다. 만일, 여러 대의 드론이 임무 영역을 나누어서 서비스하는 경우에는 데이터 획득에 실패한 영역을 다시 방문하는 데 훨씬 더 유리하게 접근할 수 있다.
드론 기반 무선 센서 네트워크에서 이동형 싱크의 역할을 수행하는 드론 역시 제한된 전원에 의해 동작하므로, 이 드론의 활동 시간을 연장하는 것이 매우 중요하다. 이를 위해 가장 좋은 방법은 임무영역을 여러 대의 드론이 나누어서 서비스하는 것이다. 이 경우에 임무영역을 어떻게 나누고 어떻게 각 드론에게 분배할 것인지를 정해야 한다. 또 다른 방법은 드론의 임무 영역에 재충전할 수 있는 재충전 스테이션들을 설치하고, 이들 재충전 스테이션들을 거쳐서 비행하는 비행 경로를 설계하는 것이다. 다시 말하면, 드론의 에너지 잔량을 실시간으로 모니터링하고, 에너지 잔량이 특정 임계치 이하로 떨어지면 드론을 근접한 재충전 스테이션으로 이동시켜 재충전하게 함으로써 드론의 활동시간을 크게 증가시킬 수 있다.
2. 드론 기반 무선 센서 네트워크 보안 발전 방안
드론 기반 무선 센서 네트워크는 데이터 수집의 효율성을 위해 기본적으로 클러스터 구조를 이용한다. 특히, 드론의 에너지를 절약하기 위해서는 고정적인 클러스터 구조보다는 주기적으로 클러스터 구조가 변경되는 것이 유리하다. 주기적인 클러스터 구조 변경을 위해서는 F-LEACH나 SecLEACH와 같은 CH 우선의 클러스터 구성 방법을 사용하여야 한다. 그러나 이 방법들은 오염된 노드가 CH 선언을 하거나 임의의 클러스터 멤버로 가입하는 것을 막지 못한다. 따라서, 이러한 오염노드들의 행위를 탐지해내는 지능적인 기법이 요구된다.
현재까지 제안된 드론 기반의 CH 선출 프레임 워크는 기본적으로 오염된 노드가 무조건 CH로 선언하는 것을 가정으로 한다. 이 경우에, 오염노드들은 모두 CH의 역할을 수행하게 되므로 다른 노드들에 비해서 에너지 소모량이 크게 증가하고 수명이 단축된다. 또한, 이들은 다른 노드들에 비해서 잔류 에너지가 작을 것이므로, 새로운 CH 리스트에서 제외되거나 블랙리스트에 포함될 확률이 높다. 따라서 공격자의 입장에서는 네트워크 내에 다른 오염노드들이 있다면, 일부 오염노드들만 CH로 선언하도록 하고, 나머지는 다음 공격을 위해 에너지 소모를 줄이도록 하는 것이 효율적이다. 따라서, 이러한 오염노드들의 협력 행위들을 탐지하고, 오염 노드들을 CH 후보에서 제거하기 위한 기법이 요구된다.
V. 결론
본 고에서는 드론 기반 무선 센서 네트워크에서의 통신 및 보안 기술의 연구 개발 동향을 살펴보았다. 드론 기반 무선 센서 네트워크의 통신 기술로는 데이터 수집 최적화, 드론의 위치 및 이동 경로 최적화, 그리고 드론의 비행 경로 최적화 기술을 살펴보았고, 보안 기술로는 인증 및 키 관리, 클러스터 구성 보안, 그리고 CH 선출 보안 기술을 살펴보았다. 향후에 드론 기반 무선 센서 네트워크의 통신 기술 발전을 위해서는 클러스터 구조의 유연성 확보, 드론 경로의 실시간 수정, 다중 드론을 이용한 임무 수행, 그리고 재충전을 통한 활동시간 증가가 필요하다. 또한, 드론 기반 무선 센서 네트워크의 보안 기술 발전을 위해서는 지능화된 오염 노드들의 행위를 탐지하고 이들을 CH 후보에서 제외하는 기법들이 요구된다.
약어 정리
추천 리포트
-
[코센리포트] 생성형 AI 주요 이슈 및 동향
-
[코센리포트] 자율인공지능 시스템
-
[코센리포트] 차세대 리튬전지용 리튬 염(Li Salt) 연구 동향
-
[코센리포트] 드론 사이버보안 위협과 해결 방안
-
[코센리포트] 드론 자율비행 기술 동향
-
[코센리포트] 사물인터넷 측면에서의 디지털트윈 기술 특징
-
[코센리포트] 디지털트윈 기술, 사례 및 표준화 동향
-
[코센리포트] 드론 최신 기술 및 군사 분야 개발 동향
-
[코센리포트] 무인항공기(드론) 기술동향 및 시장동향
-
리포트 평점
해당 콘텐츠에 대한 회원님의 소중한 평가를 부탁드립니다. -
0.0 (0개의 평가)