

- 성항법(IN, Inertial Navigation)은 고대부터 항해에 사용되던
DR(Dead Reckoning)을 확장한 개념이다.
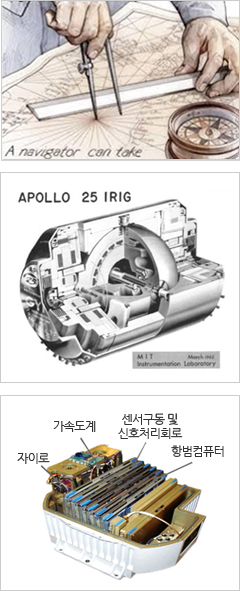
DR은 현재의 진행방향과 속도를 이용하여 출발점으로부터의 상대적인 위치를 계산하는 항법 방식인 반면에, 관성항법은 관성센서인 자이로와 가속도계로부터 출력되는 각속도와 가속도를 이용하여 항체의 현재 위치, 속도, 자세를 계산한다. - 관성센서는 1950년대 MIT의 Draper lab.을 중심으로 개발이 시작되었으며, 1960년대 관성센서의 실용화와 함께 관성항법시스템(INS, Inertial Navigation System) 역시 발전하여 오늘날 군사, 항공, 민간등 많은 분야에 적용되고 있다.
- 일반적으로 INS는 자이로, 가속도계, 센서 신호처리 보드, 항법컴퓨터로 구성된다. 자이로로 부터 얻어지는 항체의 각속도를 적분하여 항체의 자세를 계산하고, 이 자세와 가속도계로 부터 얻어지는 항체의 가속도를 결합한 후 적분하여 항체의 위치를 계산한다.
- INS는 관성센서 출력만으로 항체의 위치, 속도, 자세를 구할 수 있다는 장점을 가지고 있지만, 가속도계 및 자이로 센서 오차 및 중력장 모델 오차등이 시간에 따라 누적되어 오차가 증가하는 단점도 가지고 있다. 군용 항공기에 사용되는 고정밀 INS의 경우, 시간당 대략 500m 정도의 오차가 발생하는 것으로 알려져 있다.
- INS는 크게 김블형(Gimbaled INS)과 스트랩다운형(Strapdown INS)으로 나눌 수 있다. 김블형 INS는 3~4개의 김블구조위에 관성센서가 장착되어 외부의 자세변화와 관계없이 관성센서가 물리적으로 일정한 자세를 유지하도록 설계되어 있다. 스트랩다운형은 관성센서가 직접 동체에 장착되어 있으며, 자이로에서 측정된 각속도를 이용하여 기준 좌표계에 대한 동체의 자세를 계산한다. 스트랩다운형은 구조적으로 간단하고 전력소모가 적다는 장점을 가지나 자세를 자이로에만 의존하여 구하기 때문에 김벌형 INS에 비해 자이로의 성능이 고성능일 것이 요구된다.
- INS는 관성센서의 성능이 곧 시스템의 성능과 직결되며, Scalefactor Stability, Bias stability에 따라 Strategical Grade, Navigation Grade, Tactical Grade, Automotive Grade로 분류된다. Grade에 따른 관성센서 활용분야는 다음 그림과 같다.
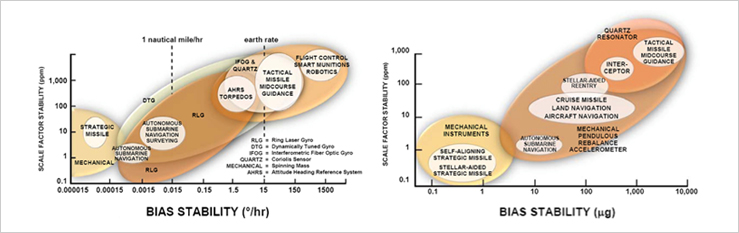
1980년대 후반부터 초소형 반도체 제조공정 기술에 근간한 MEMS 기술의 발전으로 MEMS 관성센서를 이용한 관성시스템(ARS or AHRS)이 자동차, 핸드폰, 로봇등에 광범위하게 사용되며 주목을 받고 있다.
일반적인 스트랩다운 관성항법 알고리즘의 구성은 다음그림과 같다.
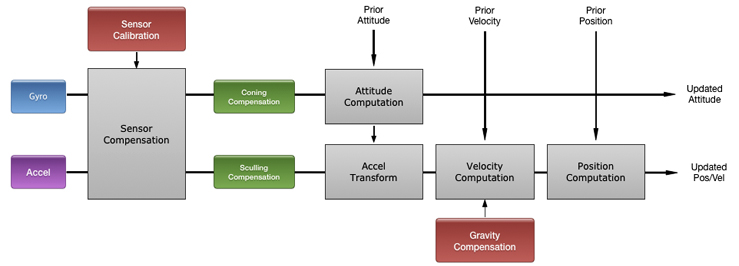
가속도계와 자이로 센서데이터는 Sensor Calibration을 통해 센서 데이터의 오차를 보상하여 보다 정확한 가속도와 각속도 데이터로 변환한다. 항법계산 주기와 센서 샘플링 주기가 다를 경우 생길 수 있는 오차를 보상하기 위하여 Coning과 Sculling Compensation을 수행한다. 각속도를 적분하여 항체의 자세를 계산하고 이 자세를 이용하여 가속도 데이터를 항법좌표계로 변환하고 중력을 보상하여 항법좌표계에서의 속도를 계산한다. 이렇게 계산된 속도를 다시 적분하여 위치를 계산한다.
알고리즘 구성도에서 알 수 있듯이 스트랩다운 관성항법 알고리즘은 특성상 해결해야할 많은 공학적인 문제들을 발생시킨다. 자이로 가속도계 센서 출력을 이용하여 자세를 계산하는 문제(Attitude Algorithm), 관성센서에서 적분과정이 충분히 빠르지 못해 생기는 오차를 보상하기 위한 코닝과 스컬링 보상(Coning and Sculling Compensation), 자이로 및 가속도계와 같은 센서 보상(Calibration)방법과 항법모드 진입전에 항체의 초기 자세를 걸정하는 초기 정렬이(Initial Alignment)나 항법모드 중에 발생하는 항법오차를 보조센서를 사용하여 보정하는 운항 중 정렬(in-Flight Alignment)등의 정렬 문제, 저가형 MEMS INS를 사용할 경우 사용하는 AHRS 알고리즘등이 있다.