

Research
You are here:

Robust Stereo Matching
Stereo matching is one of the most popular researches in computer vision because the technique can provide depth information between a camera and objects. To this end, we find correspondences between multiple images. Afterwards, disparity between correspondences can be exploited as depth for object recognition, visual surveillance, and other fields.
Object Tracking
Object tracking technique is important for many computer vision applications such as security and surveillance, robotics, automotive driver assistant systems, etc. The role of object tracking is to track multiple or single objects and keep their identity as long as possible.

SLAM and Structure from Motion
SLAM is a technique used by robots and autonomous vehicles and is defined as the problem of building a model leading to a new map, or repetitively improving an existing map, while at the same time localizing the robot within that map.
Object Categorization based on Graph Structures
Object Categorization is a classical research topic which determines whether the given image contains the certain category of object. Because the objects are represented with different color, shape, structure in images, we need to understand the characteristics of each object class and describe them effectively. In order to address these variations, the graph structure could be the one of solutions because the graph structure has a strong capacity for representation, and it is robust to various deformations. In this research, we study about how generate the representative graph model for each category and recognize them.

Driver Assistant System (DAS)
Driver assistance system is an automated vehicle system to support safe driving by analyzing dynamic environment. The main applications are ACC (Adaptive Cruise Control), FCW (Forward Collision Warning), AHB (Adaptive High-Beam). In the viewpoint of vision technology, they commonly consist of 3D object detection/tracking, dense stereo matching, and visual odometry.

IMU-camera based Navigation
Fusion of heterogeneous sensors is an important issue to handle practical issues in a real world. For the localization of mobile devices, the IMU-camera fusion which is inspired from the human system is very useful due to the complimentary properties.

Color Correction for Image Mosaic
Many computer vision tasks, such as image matching and image stitching, require color consistency. However, different cameras or settings could generate different colored images despite a static scene. To be similar for colors of multiple images, methods presented in this field change colors of input images. Here, we focus on handling color differences in the case of image stitching.
Object Detection
The role of object detection is to localize (position, size) semantic objects having a certain class (e.g. humans, cars, animals, or etc) in digital images. Object detection is widely used in the field of computer vision because of its wide applications to video surveillance, image retrieval, human-computer interface, medical imaging, and so on.
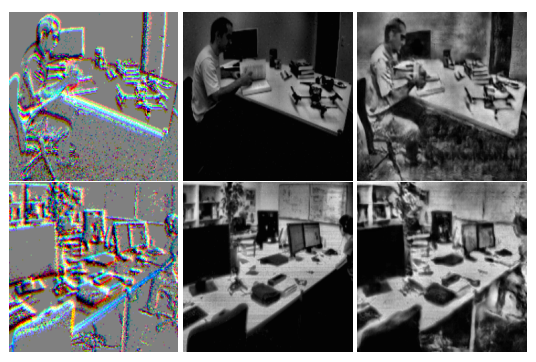
Event Camera
Event cameras have a lot of advantages over traditional cameras, such as low latency, high temporal resolution, and high dynamic range. However, since the outputs of event cameras are the sequences of asynchronous events over time rather than actual intensity images, existing algorithms could not be directly applied. Therefore, it is demanding to generate intensity images from events for other tasks.